Impact of Computation in Integral Reinforcement Learning for Continuous-Time Control
Wenhan Cao ⋅ Wei Pan
2024 Spotlight Poster
{kind=link}
Abstract
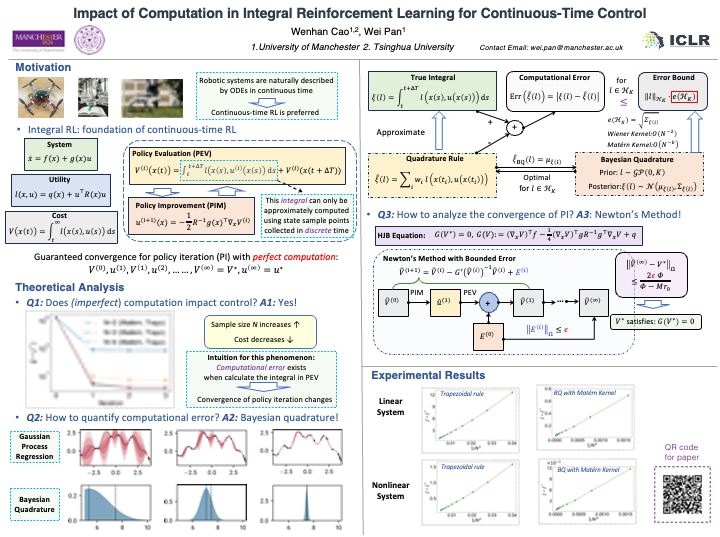
Integral reinforcement learning (IntRL) demands the precise computation of the utility function's integral at its policy evaluation (PEV) stage. This is achieved through quadrature rules, which are weighted sums of utility functions evaluated from state samples obtained in discrete time. Our research reveals a critical yet underexplored phenomenon: the choice of the computational method -- in this case, the quadrature rule -- can significantly impact control performance. This impact is traced back to the fact that computational errors introduced in the PEV stage can affect the policy iteration's convergence behavior, which in turn affects the learned controller. To elucidate how computation impacts control, we draw a parallel between IntRL's policy iteration and Newton's method applied to the Hamilton-Jacobi-Bellman equation. In this light, computational error in PEV manifests as an extra error term in each iteration of Newton's method, with its upper bound proportional to the computational error. Further, we demonstrate that when the utility function resides in a reproducing kernel Hilbert space (RKHS), the optimal quadrature is achievable by employing Bayesian quadrature with the RKHS-inducing kernel function. We prove that the local convergence rates for IntRL using the trapezoidal rule and Bayesian quadrature with a Matérn kernel to be $O(N^{-2})$ and $O(N^{-b})$, where $N$ is the number of evenly-spaced samples and $b$ is the Matérn kernel's smoothness parameter. These theoretical findings are finally validated by two canonical control tasks.
Video
Chat is not available.
Successful Page Load