Provably Efficient Iterated CVaR Reinforcement Learning with Function Approximation and Human Feedback
{kind=link}
Abstract
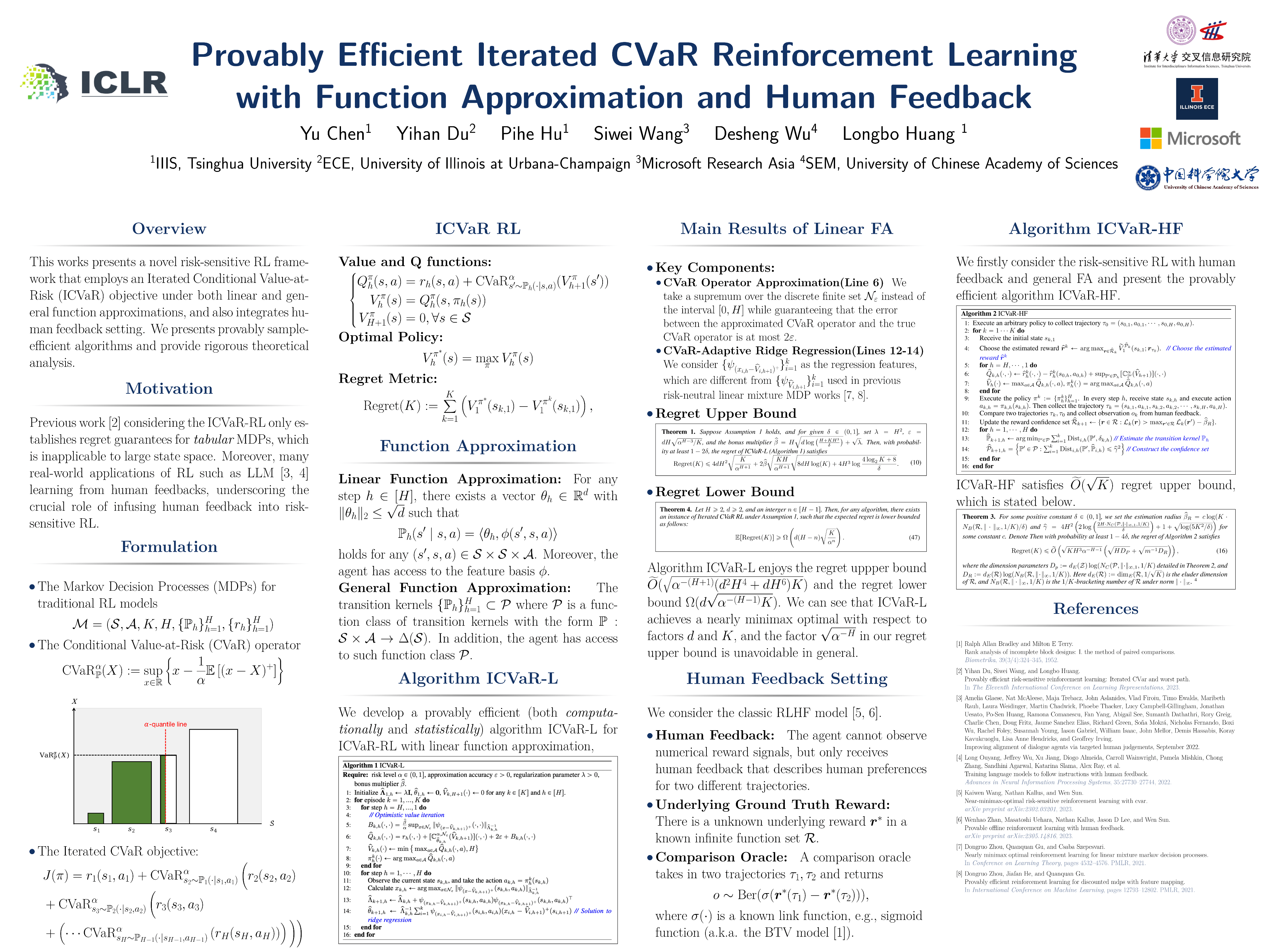
Risk-sensitive reinforcement learning (RL) aims to optimize policies that balance the expected reward and risk. In this paper, we present a novel risk-sensitive RL framework that employs an Iterated Conditional Value-at-Risk (CVaR) objective under both linear and general function approximations, enriched by human feedback. These new formulations provide a principled way to guarantee safety in each decision making step throughout the control process. Moreover, integrating human feedback into risk-sensitive RL framework bridges the gap between algorithmic decision-making and human participation, allowing us to also guarantee safety for human-in-the-loop systems. We propose provably sample-efficient algorithms for this Iterated CVaR RL and provide rigorous theoretical analysis. Furthermore, we establish a matching lower bound to corroborate the optimality of our algorithms in a linear context.