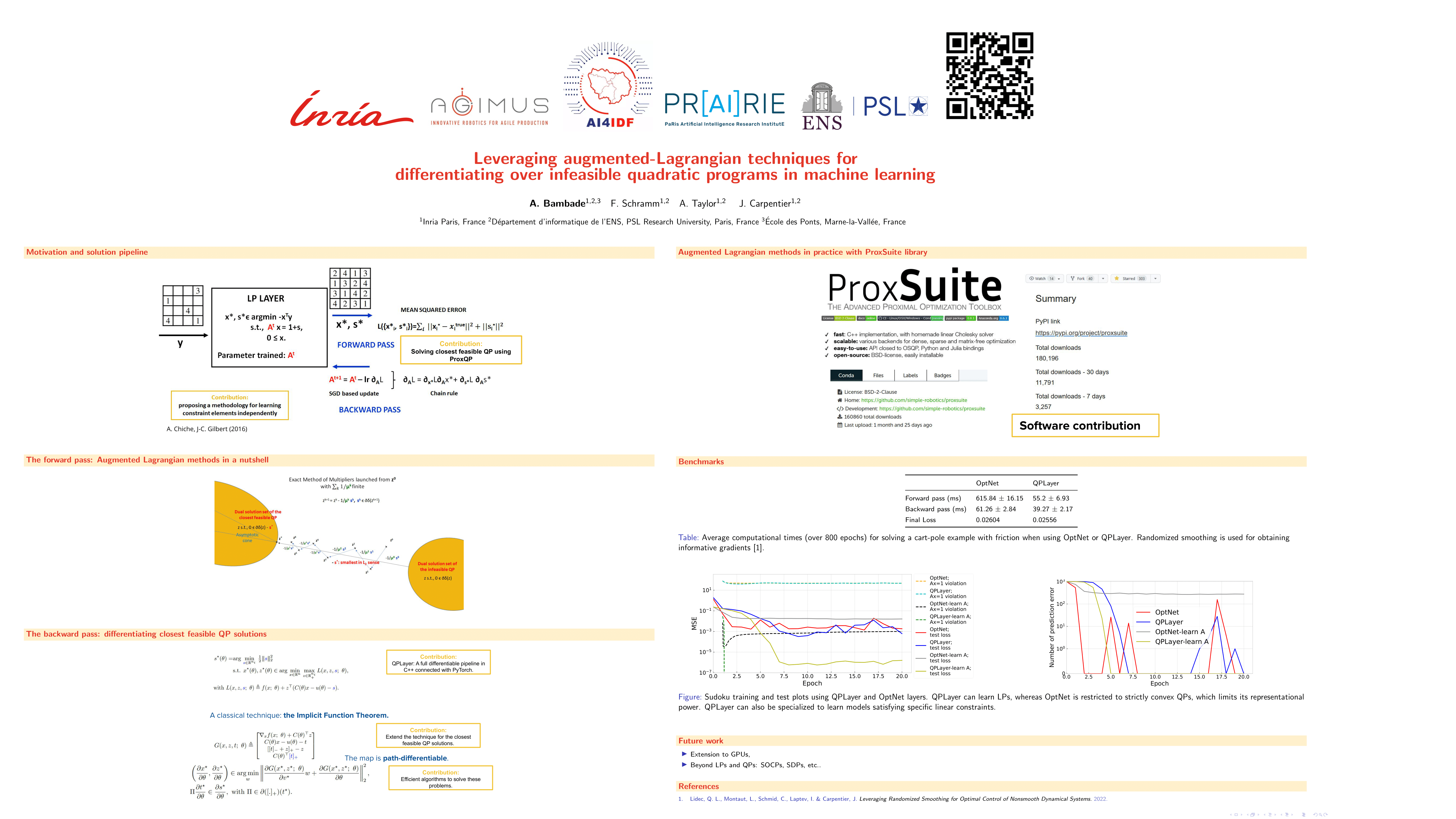
Leveraging augmented-Lagrangian techniques for differentiating over infeasible quadratic programs in machine learning
Antoine Bambade ⋅ Fabian Schramm ⋅ Adrien Taylor ⋅ Justin Carpentier
2024 Spotlight Poster
{kind=link}
Abstract
Optimization layers within neural network architectures have become increasingly popular for their ability to solve a wide range of machine learning tasks and to model domain-specific knowledge. However, designing optimization layers requires careful consideration as the underlying optimization problems might be infeasible during training. Motivated by applications in learning, control and robotics, this work focuses on convex quadratic programming (QP) layers. The specific structure of this type of optimization layer can be efficiently exploited for faster computations while still allowing rich modeling capabilities. We leverage primal-dual augmented Lagrangian techniques for computing derivatives of both feasible and infeasible QP solutions. More precisely, we propose a unified approach which tackles the differentiability of the closest feasible QP solutions in a classical $\ell_2$ sense. We then harness this approach to enrich the expressive capabilities of existing QP layers. More precisely, we show how differentiating through infeasible QPs during training enables to drive towards feasibility at test time a new range of QP layers. These layers notably demonstrate superior predictive performance in some conventional learning tasks. Additionally, we present alternative formulations that enhance numerical robustness, speed, and accuracy for training such layers. Along with these contributions, we provide an open-source C++ software package called QPLayer for differentiating feasible and infeasible convex QPs and which can be interfaced with modern learning frameworks.
Video
Chat is not available.
Successful Page Load