3D-Aware Hypothesis & Verification for Generalizable Relative Object Pose Estimation
{kind=link}
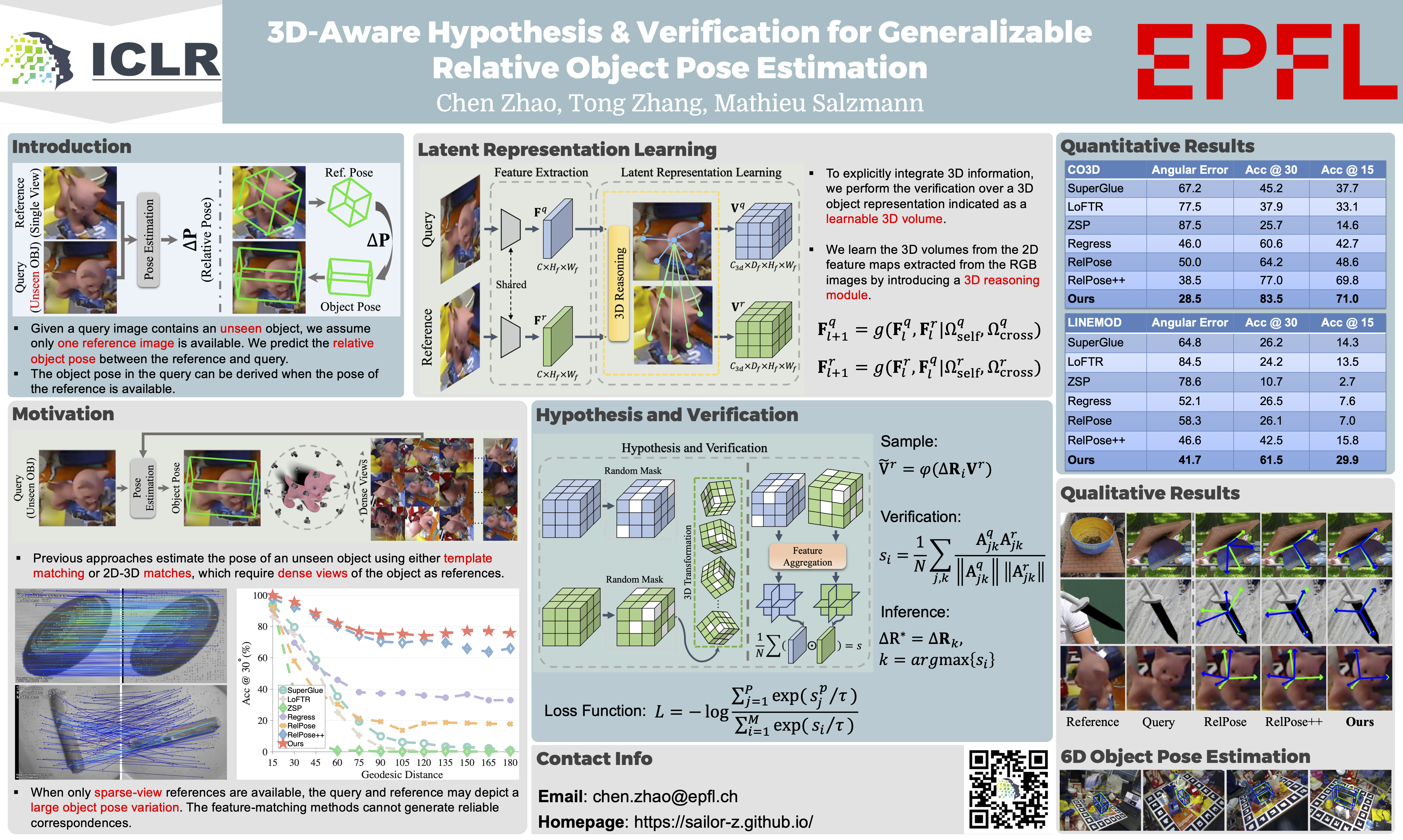
Abstract
Prior methods that tackle the problem of generalizable object pose estimation highly rely on having dense views of the unseen object. By contrast, we address the scenario where only a single reference view of the object is available. Our goal then is to estimate the relative object pose between this reference view and a query image that depicts the object in a different pose. In this scenario, robust generalization is imperative due to the presence of unseen objects during testing and the large-scale object pose variation between the reference and the query. To this end, we present a new hypothesis-and-verification framework, in which we generate and evaluate multiple pose hypotheses, ultimately selecting the most reliable one as the relative object pose. To measure reliability, we introduce a 3D-aware verification that explicitly applies 3D transformations to the 3D object representations learned from the two input images. Our comprehensive experiments on the Objaverse, LINEMOD, and CO3D datasets evidence the superior accuracy of our approach in relative pose estimation and its robustness in large-scale pose variations, when dealing with unseen objects.