Uncertainty-aware Constraint Inference in Inverse Constrained Reinforcement Learning
{kind=link}
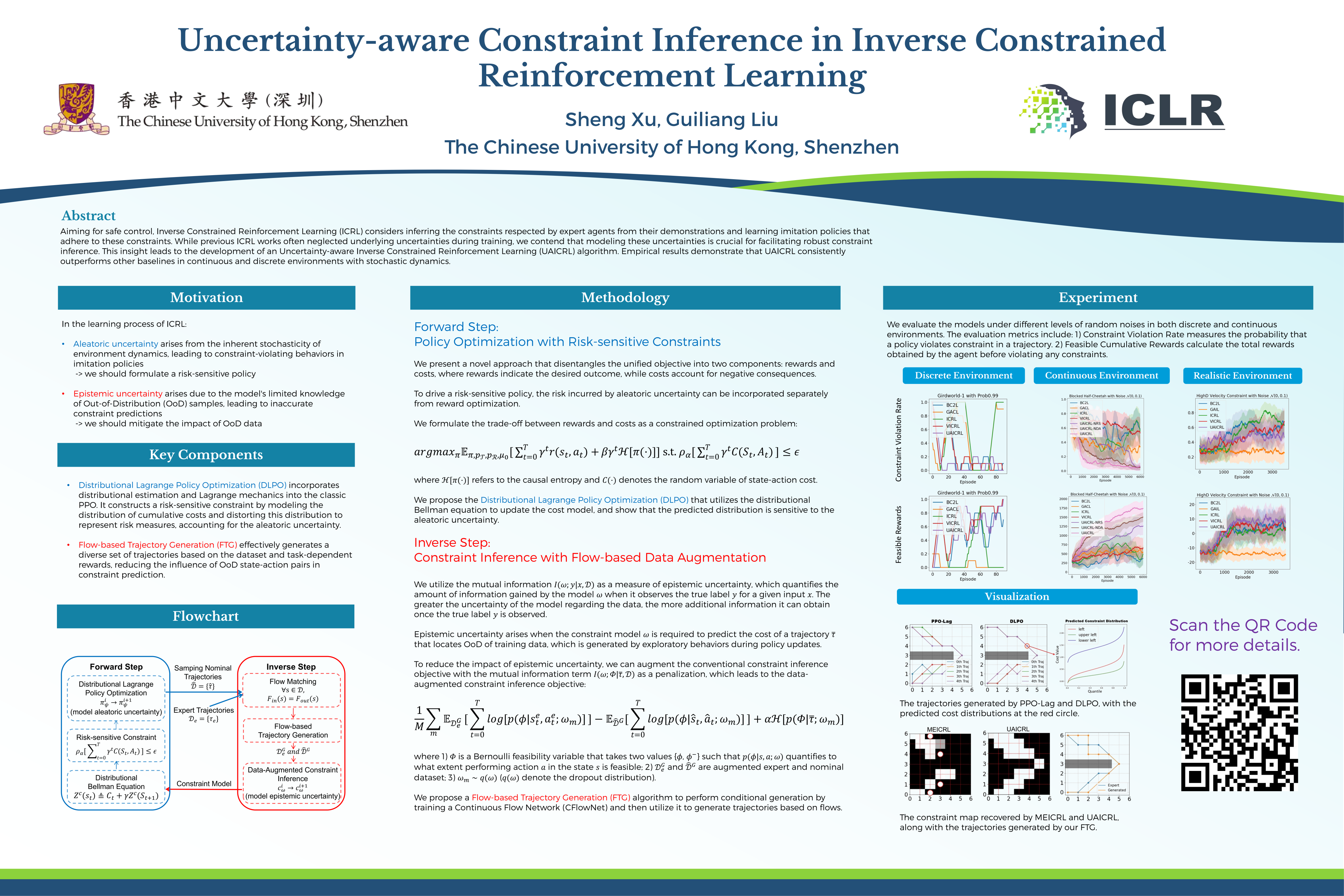
Abstract
Aiming for safe control, Inverse Constrained Reinforcement Learning (ICRL) considers inferring the constraints respected by expert agents from their demonstrations and learning imitation policies that adhere to these constraints. While previous ICRL works often neglected underlying uncertainties during training, we contend that modeling these uncertainties is crucial for facilitating robust constraint inference. This insight leads to the development of an Uncertainty-aware Inverse Constrained Reinforcement Learning (UAICRL) algorithm. Specifically, 1) aleatoric uncertainty arises from the inherent stochasticity of environment dynamics, leading to constraint-violating behaviors in imitation policies. To address this, UAICRL constructs risk-sensitive constraints by incorporating distributional Bellman updates into the cumulative costs model. 2) Epistemic uncertainty, resulting from the model's limited knowledge of Out-of-Distribution (OoD) samples, affects the accuracy of step-wise cost predictions. To tackle this issue, UAICRL develops an information-theoretic quantification of the epistemic uncertainty and mitigates its impact through flow-based generative data augmentation. Empirical results demonstrate that UAICRL consistently outperforms other baselines in continuous and discrete environments with stochastic dynamics. The code is available at https://github.com/Jasonxu1225/UAICRL.