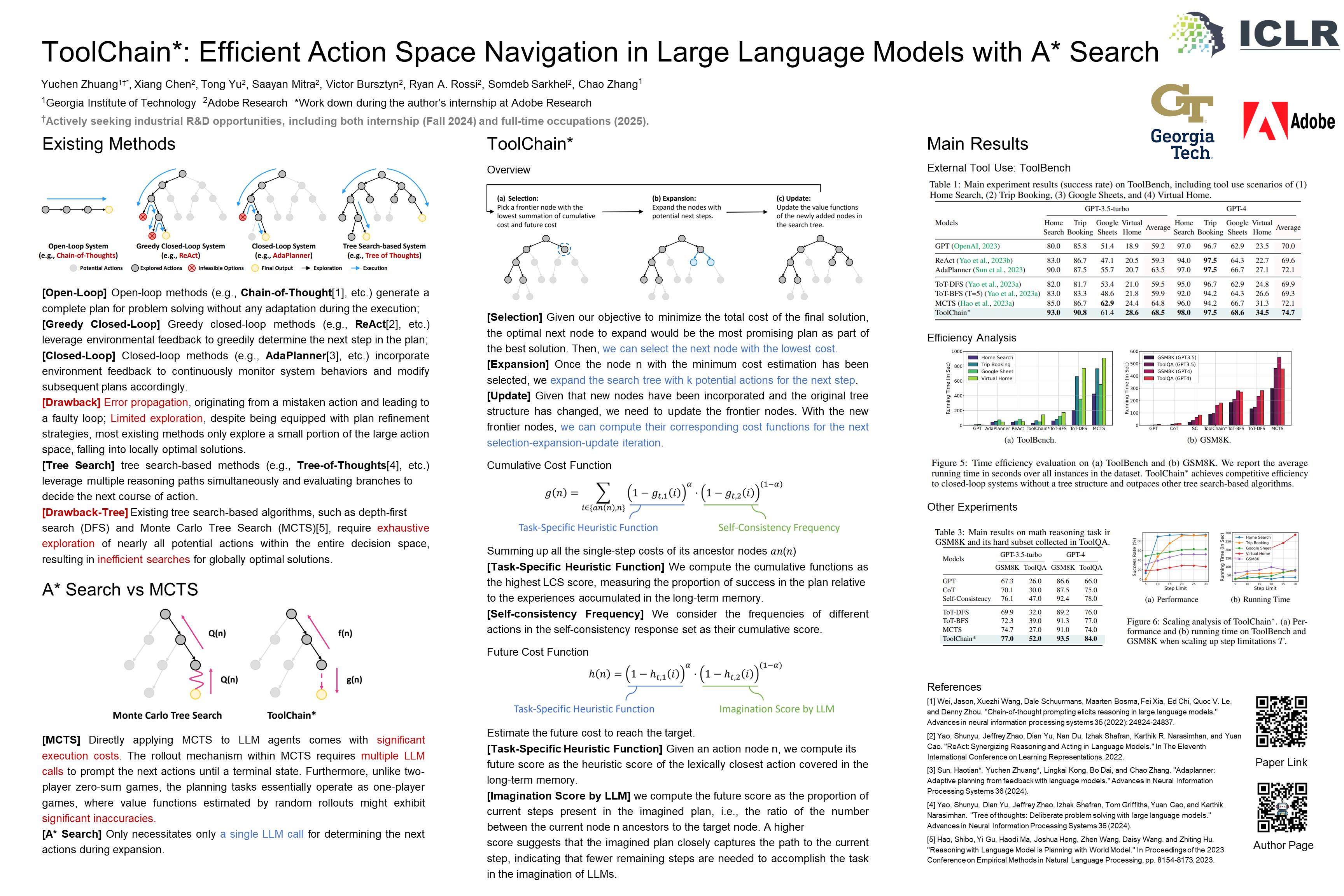
ToolChain*: Efficient Action Space Navigation in Large Language Models with A* Search
Yuchen Zhuang ⋅ Xiang Chen ⋅ Tong Yu ⋅ Saayan Mitra ⋅ Victor Bursztyn ⋅ Ryan Rossi ⋅ Somdeb Sarkhel ⋅ Chao Zhang
2024 Poster
{kind=link}
Abstract
Large language models (LLMs) have demonstrated powerful decision-making and planning capabilities in solving complicated real-world problems. LLM-based autonomous agents can interact with diverse tools (e.g., functional APIs) and generate solution plans that execute a series of API function calls in a step-by-step manner. The multitude of candidate API function calls significantly expands the action space, amplifying the critical need for efficient action space navigation. However, existing methods either struggle with unidirectional exploration in expansive action spaces, trapped into a locally optimal solution, or suffer from exhaustively traversing all potential actions, causing inefficient navigation. To address these issues, we propose ToolChain*, an efficient tree search-based planning algorithm for LLM-based agents. It formulates the entire action space as a decision tree, where each node represents a possible API function call involved in a solution plan. By incorporating the A$^*$ search algorithm with task-specific cost function design, it efficiently prunes high-cost branches that may involve incorrect actions, identifying the most low-cost valid path as the solution. Extensive experiments on multiple tool-use and reasoning tasks demonstrate that ToolChain* efficiently balances exploration and exploitation within an expansive action space. It outperforms state-of-the-art baselines on planning and reasoning tasks by 3.1% and 3.5% on average while requiring 7.35x and 2.31x less time, respectively.
Video
Chat is not available.
Successful Page Load