A Policy Gradient Method for Confounded POMDPs
{kind=link}
Abstract
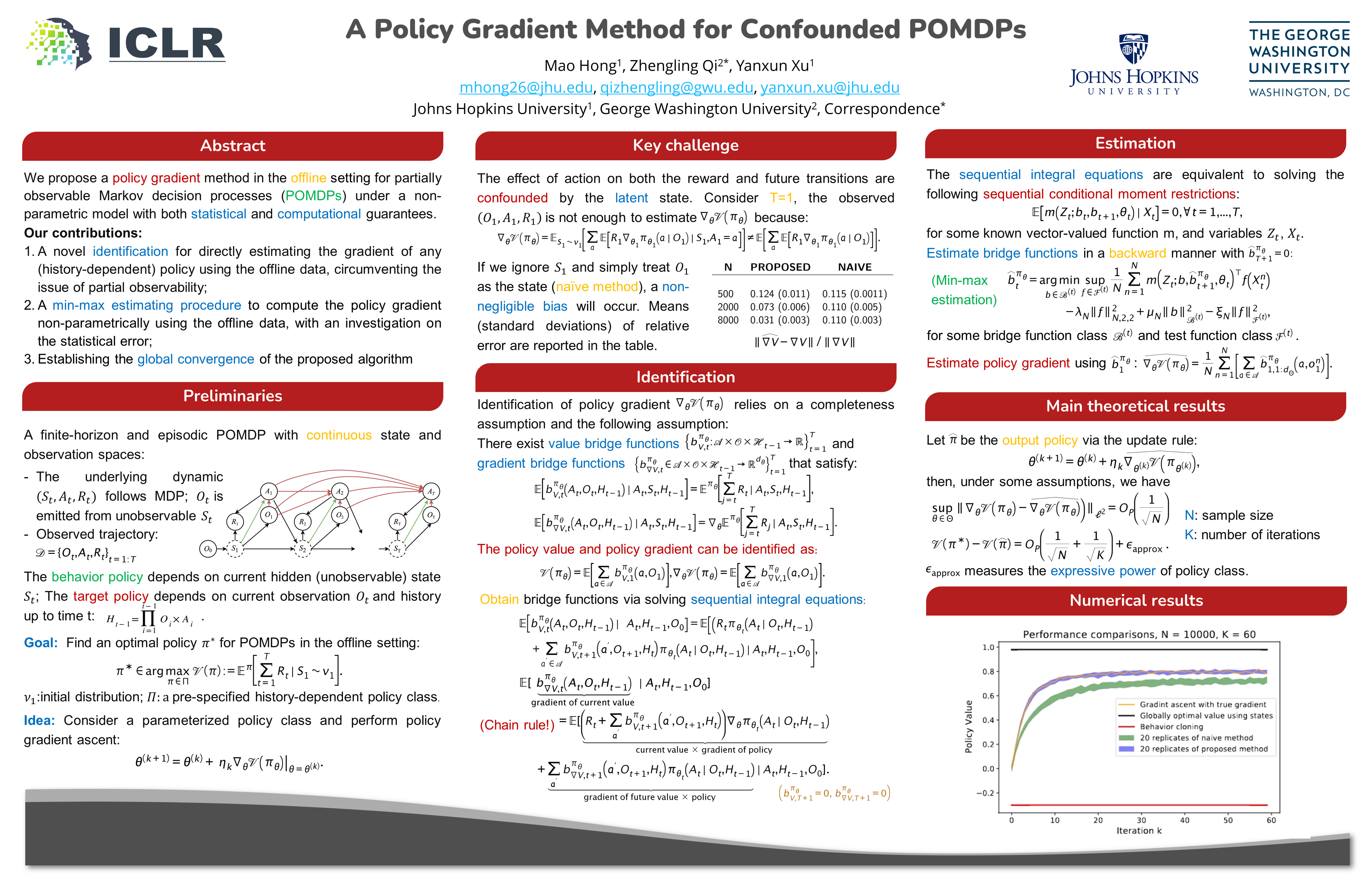
In this paper, we propose a policy gradient method for confounded partially observable Markov decision processes (POMDPs) with continuous state and observation spaces in the offline setting. We first establish a novel identification result to non-parametrically estimate any history-dependent policy gradient under POMDPs using the offline data. The identification enables us to solve a sequence of conditional moment restrictions and adopt the min-max learning procedure with general function approximation for estimating the policy gradient. We then provide a finite-sample non-asymptotic bound for estimating the gradient uniformly over a pre-specified policy class in terms of the sample size, length of horizon, concentratability coefficient and the measure of ill-posedness in solving the conditional moment restrictions. Lastly, by deploying the proposed gradient estimation in the gradient ascent algorithm, we show the global convergence of the proposed algorithm in finding the history-dependent optimal policy under some technical conditions. To the best of our knowledge, this is the first work studying the policy gradient method for POMDPs under the offline setting.