BroGNet: Momentum-Conserving Graph Neural Stochastic Differential Equation for Learning Brownian Dynamics
{kind=link}
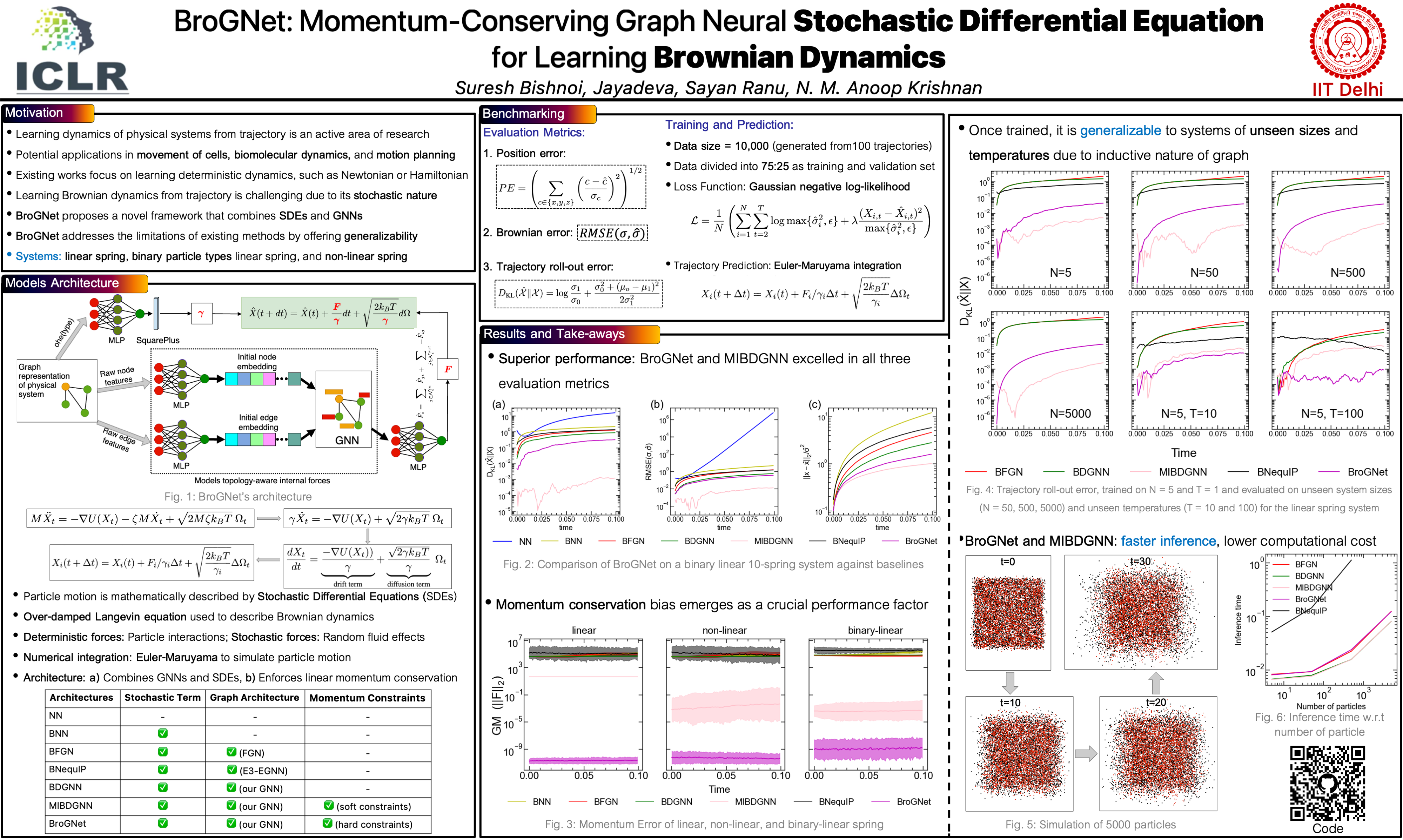
Abstract
Neural networks (NNs) that exploit strong inductive biases based on physical laws and symmetries have shown remarkable success in learning the dynamics of physical systems directly from their trajectory. However, these works focus only on the systems that follow deterministic dynamics, such as Newtonian or Hamiltonian. Here, we propose a framework, namely Brownian graph neural networks (BroGNet), combining stochastic differential equations (SDEs) and GNNs to learn Brownian dynamics directly from the trajectory. We modify the architecture of BroGNet to enforce linear momentum conservation of the system, which, in turn, provides superior performance on learning dynamics as revealed empirically. We demonstrate this approach on several systems, namely, linear spring, linear spring with binary particle types, and non-linear spring systems, all following Brownian dynamics at finite temperatures. We show that BroGNet significantly outperforms proposed baselines across all the benchmarked Brownian systems. In addition, we demonstrate zero-shot generalizability of BroGNet to simulate unseen system sizes that are two orders of magnitude larger and to different temperatures than those used during training. Finally, we show that BroGNet conserves the momentum of the system resulting in superior performance and data efficiency. Altogether, our study contributes to advancing the understanding of the intricate dynamics of Brownian motion and demonstrates the effectiveness of graph neural networks in modeling such complex systems.