LiDAR-PTQ: Post-Training Quantization for Point Cloud 3D Object Detection
{kind=link}
Abstract
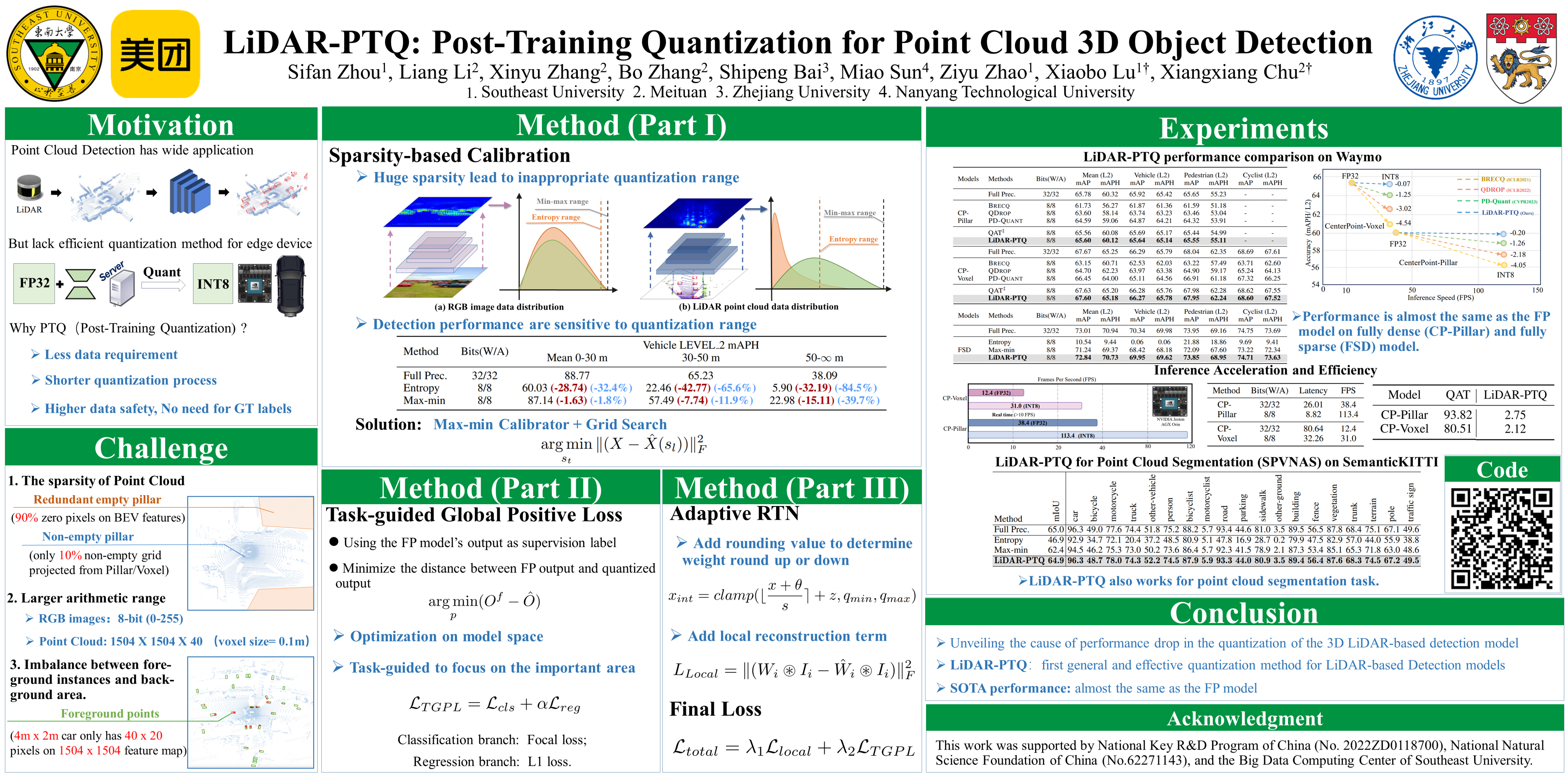
Due to highly constrained computing power and memory, deploying 3D lidar-based detectors on edge devices equipped in autonomous vehicles and robots poses a crucial challenge. Being a convenient and straightforward model compression approach, Post-Training Quantization (PTQ) has been widely adopted in 2D vision tasks. However, applying it directly to 3D lidar-based tasks inevitably leads to performance degradation. As a remedy, we propose an effective PTQ method called LiDAR-PTQ, which is particularly curated for 3D lidar detection (both SPConv-based and SPConv-free). Our LiDAR-PTQ features three main components, (1) a sparsity-based calibration method to determine the initialization of quantization parameters, (2) an adaptive rounding-to-nearest operation to minimize the layerwise reconstruction error, (3) a Task-guided Global Positive Loss (TGPL) to reduce the disparity between the final predictions before and after quantization. Extensive experiments demonstrate that our LiDAR-PTQ can achieve state-of-the-art quantization performance when applied to CenterPoint (both Pillar-based and Voxel-based). To our knowledge, for the very first time in lidar-based 3D detection tasks, the PTQ INT8 model's accuracy is almost the same as the FP32 model while enjoying 3X inference speedup. Moreover, our LiDAR-PTQ is cost-effective being 6X faster than the quantization-aware training method. The code will be released.