Contact-guided Real2Sim from Monocular Video with Planar Scene Primitives
{kind=link}
Abstract
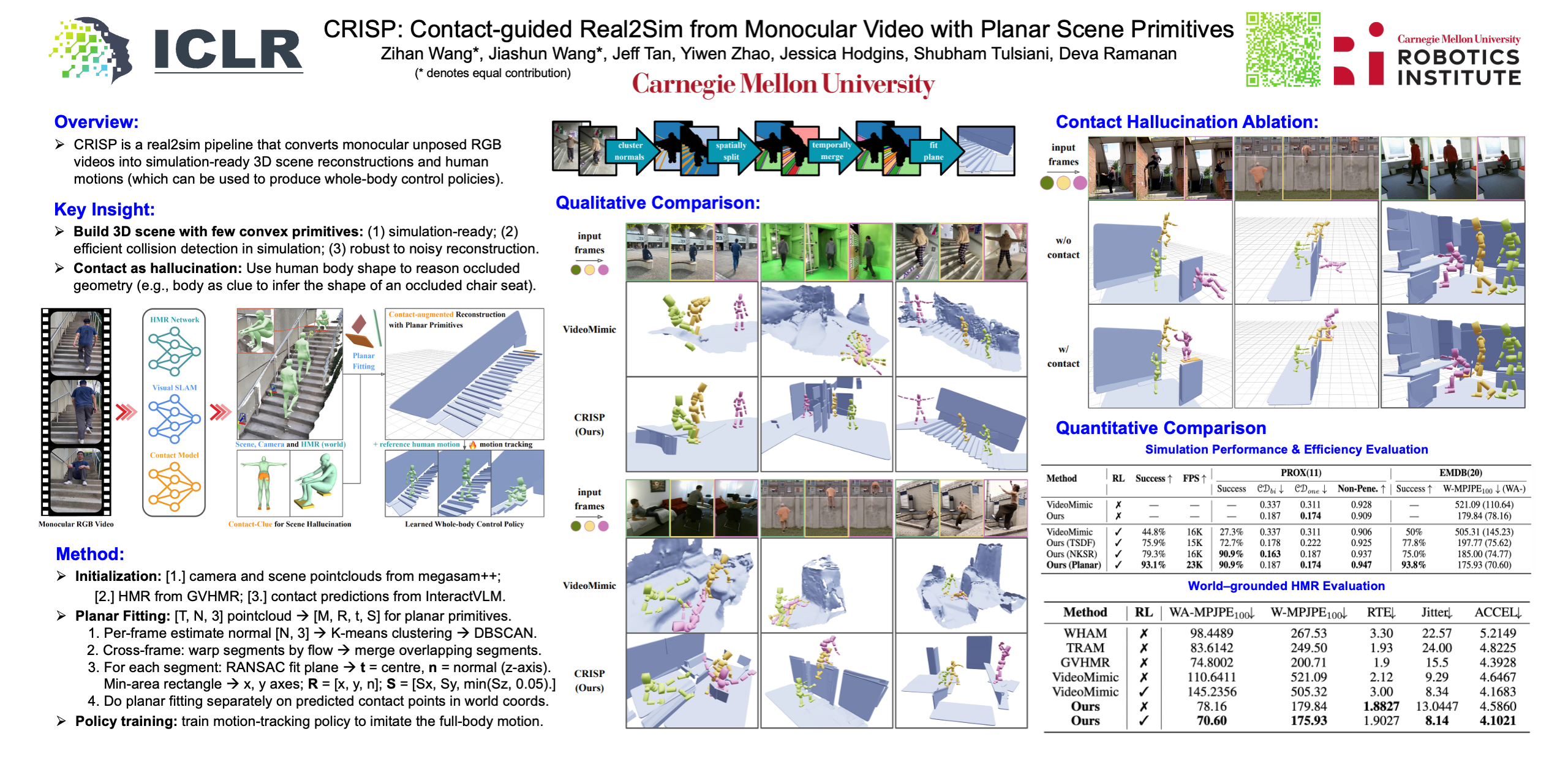
We introduce CRISP, a method that recovers simulatable human motion and scene geometry from monocular video. Prior work on joint human--scene reconstruction relies on data-driven priors and joint optimization with no physics in the loop, or recovers noisy geometry with artifacts that cause motion-tracking policies with scene interactions to fail. In contrast, our key insight is to fit simulation-ready convex planar primitives to a depth-based point cloud reconstruction of the scene via a simple clustering pipeline over depth, normals, and flow. To reconstruct scene geometry that might be occluded during interactions, we use human--scene contact modeling (e.g., using human posture to reconstruct the occluded seat of a chair). Finally, we ensure that human and scene reconstructions are physically plausible by using them to drive a humanoid controller via reinforcement learning. Our approach reduces motion-tracking failure rates from 55.2\% to 6.9\% on human-centric video benchmarks (EMDB, PROX), while delivering 43\% faster RL simulation throughput. This demonstrates CRISP's ability to generate physically valid human motion and interaction environments at scale, advancing real-to-sim applications for robotics. Code and interactive demos are available at our project website: https://crisp-real2sim.github.io/CRISP-Real2Sim