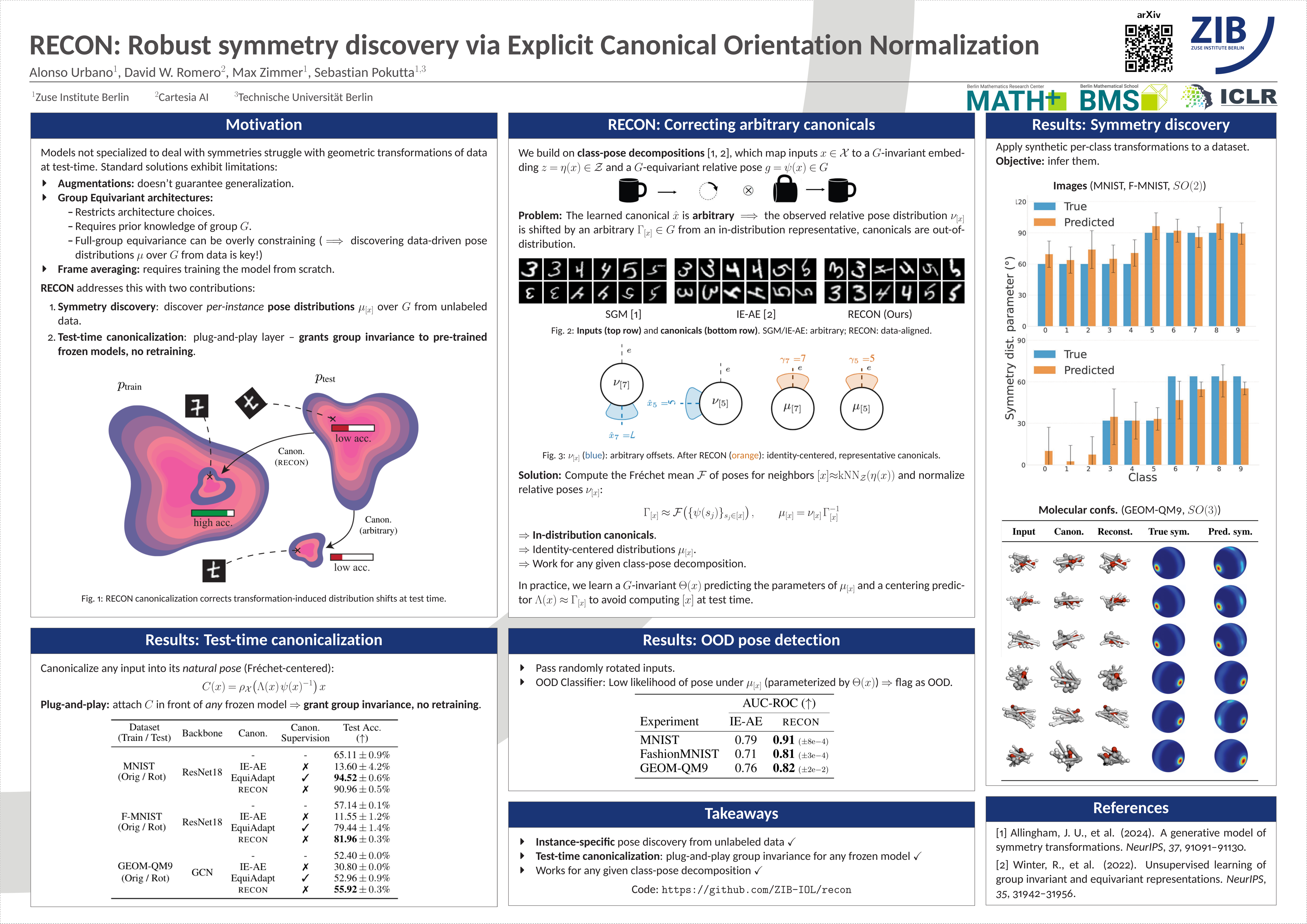
RECON: Robust symmetry discovery via Explicit Canonical Orientation Normalization
Alonso Urbano ⋅ David Wilson Romero ⋅ Max Zimmer ⋅ Sebastian Pokutta
{kind=link}
Abstract
Real world data often exhibits unknown, instance-specific symmetries that rarely exactly match a transformation group $G$ fixed a priori. Class-pose decompositions aim to create disentangled representations by factoring inputs into invariant features and a pose $g\in G$ defined relative to a training-dependent, \emph{arbitrary} canonical representation. We introduce RECON, a class-pose agnostic \emph{canonical orientation normalization} that corrects arbitrary canonicals via a simple right translation, yielding \emph{natural}, data-aligned canonicalizations. This enables (i) unsupervised discovery of instance-specific pose distributions, (ii) detection of out-of-distribution poses and (iii) a plug-and-play \emph{test-time canonicalization layer}. This layer can be attached on top of any pre-trained model to infuse group invariance, improving its performance without retraining. We validate on 2D (images) and 3D (molecular ensembles), demonstrating fine-grained, accurate pose discovery, and matching or outperforming label-supervised canonicalizations in downstream classification.
Video
Chat is not available.
Successful Page Load