RayI2P: Learning Rays for Image-to-Point Cloud Registration
{kind=link}
Abstract
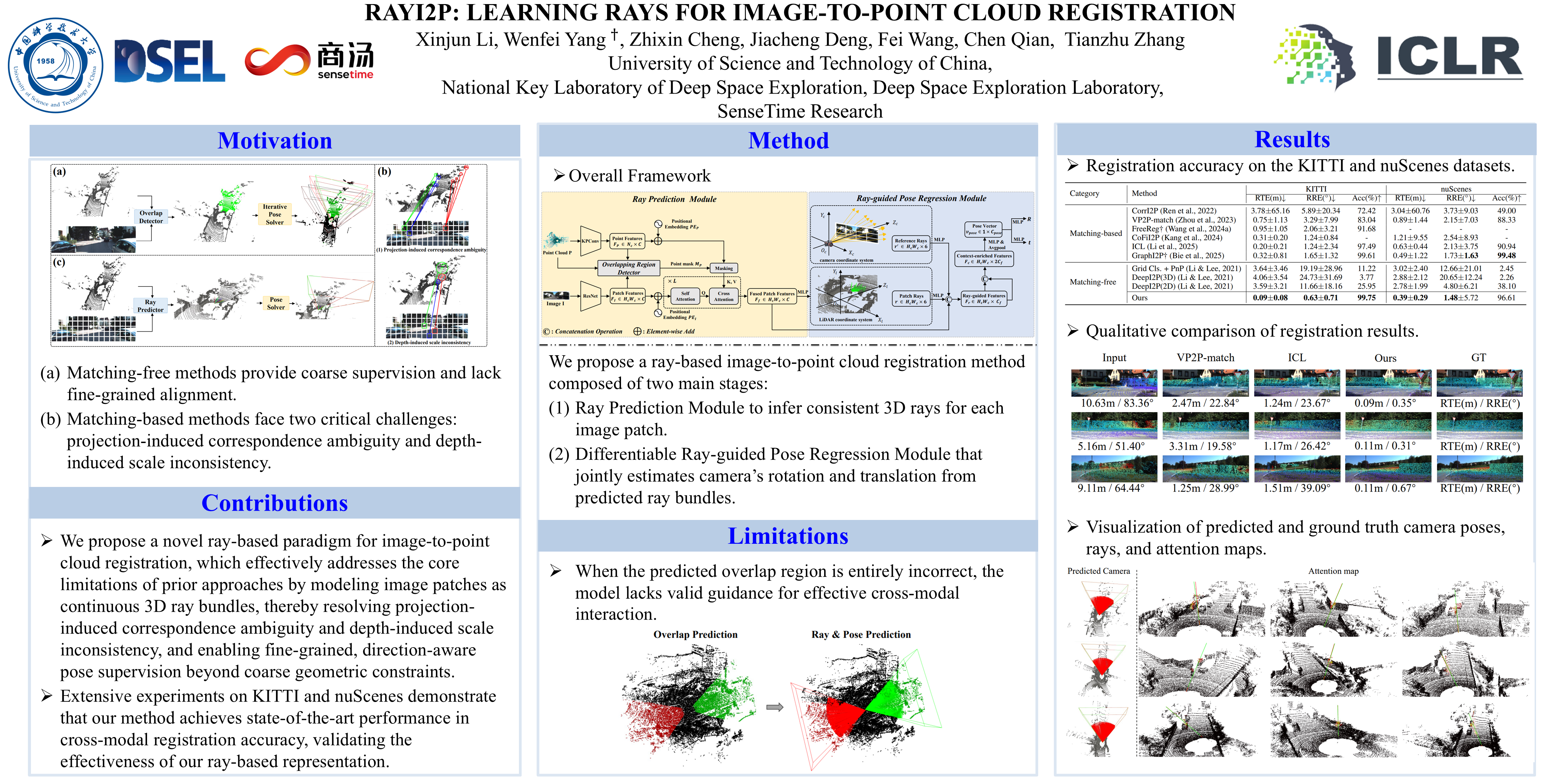
Image-to-point cloud registration aims to estimate the 6-DoF camera pose of a query image relative to a 3D point cloud map. Existing methods fall into two categories: matching-free methods regress pose directly using geometric priors, but lack fine-grained supervision and struggle with precise alignment; matching-based methods construct dense 2D-3D correspondences for PnP-based pose estimation, but are fundamentally limited by projection ambiguity (where multiple geometrically distinct 3D points project to the same image patch, leading to ambiguous feature representations) and scale inconsistency (where fixed-size image patches correspond to 3D regions of varying physical size, causing misaligned receptive fields across modalities). To address these issues, we propose a novel ray-based registration framework that first predicts patch-wise 3D ray bundles connecting image patches to the 3D scene and then estimates camera pose via a differentiable ray-guided regression module, bypassing the need for explicit 2D-3D correspondences. This formulation naturally resolves projection ambiguity, provides scale-consistent geometry encoding, and enables fine-grained supervision for accurate pose estimation. Experiments on KITTI and nuScenes show that our approach achieves state-of-the-art registration accuracy, outperforming existing methods.