Towards a Theoretical Understanding of In-context Learning: Stability and Non-I.I.D Generalisation
{kind=link}
Abstract
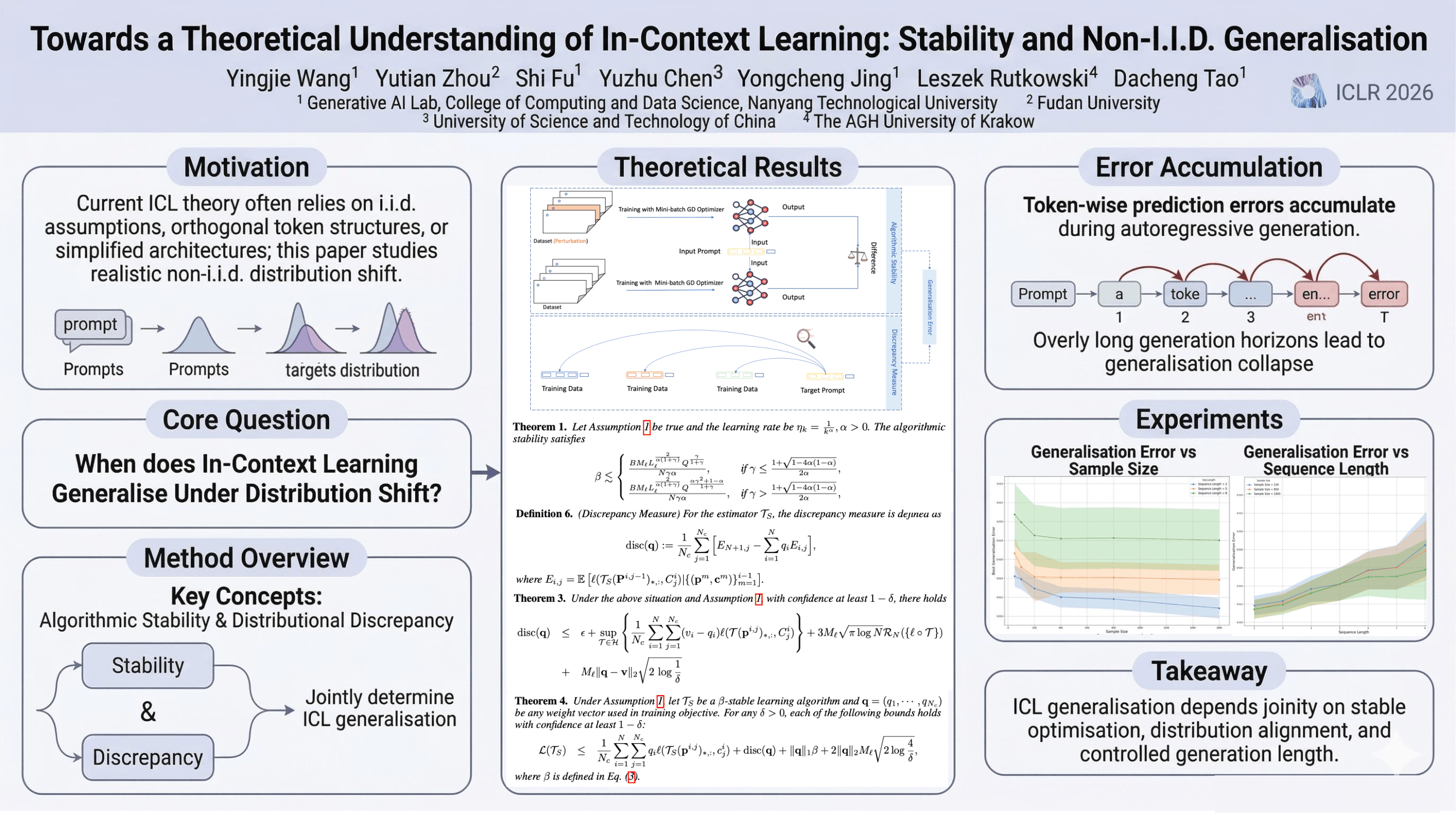
In-context learning (ICL) has demonstrated significant performance improvements in transformer-based large models. This study identifies two key factors influencing ICL generalisation under complex non-i.i.d. scenario: algorithmic stability and distributional discrepancy. First, we establish a stability bound for transformer-based models trained with mini-batch gradient descent, revealing how specific optimization configurations interact with the smoothness of the loss landscape to ensure the stability of non-linear Transformers. Next, we introduce a distribution-level discrepancy measure that highlights the importance of aligning the ICL prompt distribution with the training data distribution to achieve effective generalisation. Building on these insights, we derive a generalisation error bound for ICL with asymptotic convergence guarantees, which further reveals that token-wise prediction errors accumulate over time and even lead to generalisation collapse if the prediction length is not properly constrained. Finally, empirical evaluations are provided to validate our theoretical findings.