RoboInter: A Holistic Intermediate Representation Suite Towards Robotic Manipulation
{kind=link}
Abstract
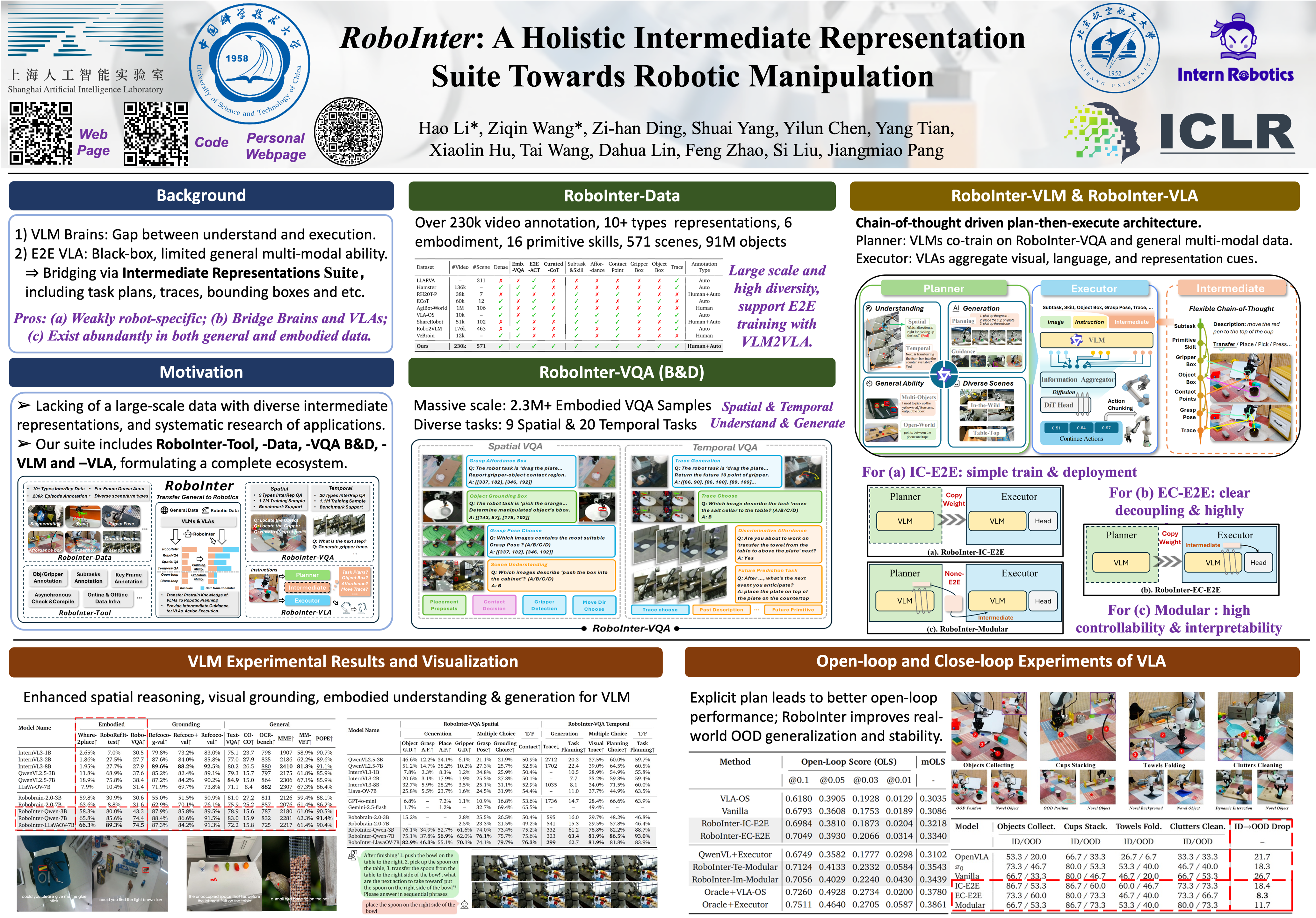
Advances in large vision-language models (VLMs) have stimulated growing interest in vision-language-action (VLA) systems for robot manipulation. However, existing manipulation datasets remain costly to curate, highly embodiment-specific, and insufficient in coverage and diversity, thereby hindering the generalization of VLA models. Recent approaches attempt to mitigate these limitations via a plan-then-execute paradigm, where high-level plans (e.g., subtasks, trace) are first generated and subsequently translated into low-level actions, but they critically rely on extra intermediate supervision, which is largely absent from existing datasets. To bridge this gap, we introduce the RoboInter Manipulation Suite, a unified resource including data, benchmarks, and models of intermediate representations for manipulation. It comprises RoboInter-Tool, a lightweight GUI that enables semi-automatic annotation of diverse representations, and RoboInter-Data, a large-scale dataset containing over 230k episodes across 571 diverse scenes, which provides dense per-frame annotations over more than 10 categories of intermediate representations, substantially exceeding prior work in scale and annotation quality. Building upon this foundation, RoboInter-VQA introduces 9 spatial and 20 temporal embodied VQA categories to systematically benchmark and enhance the embodied reasoning capabilities of VLMs. Meanwhile, RoboInter-VLA offers an integrated plan-then-execute framework, supporting modular and end-to-end VLA variants that bridge high-level planning with low-level execution via intermediate supervision. In total, RoboInter establishes a practical foundation for advancing robust and generalizable robotic learning via fine-grained and diverse intermediate representations.