Scalable and Adaptive Trust-Region Learning via Projection Convex Hull
{kind=link}
Abstract
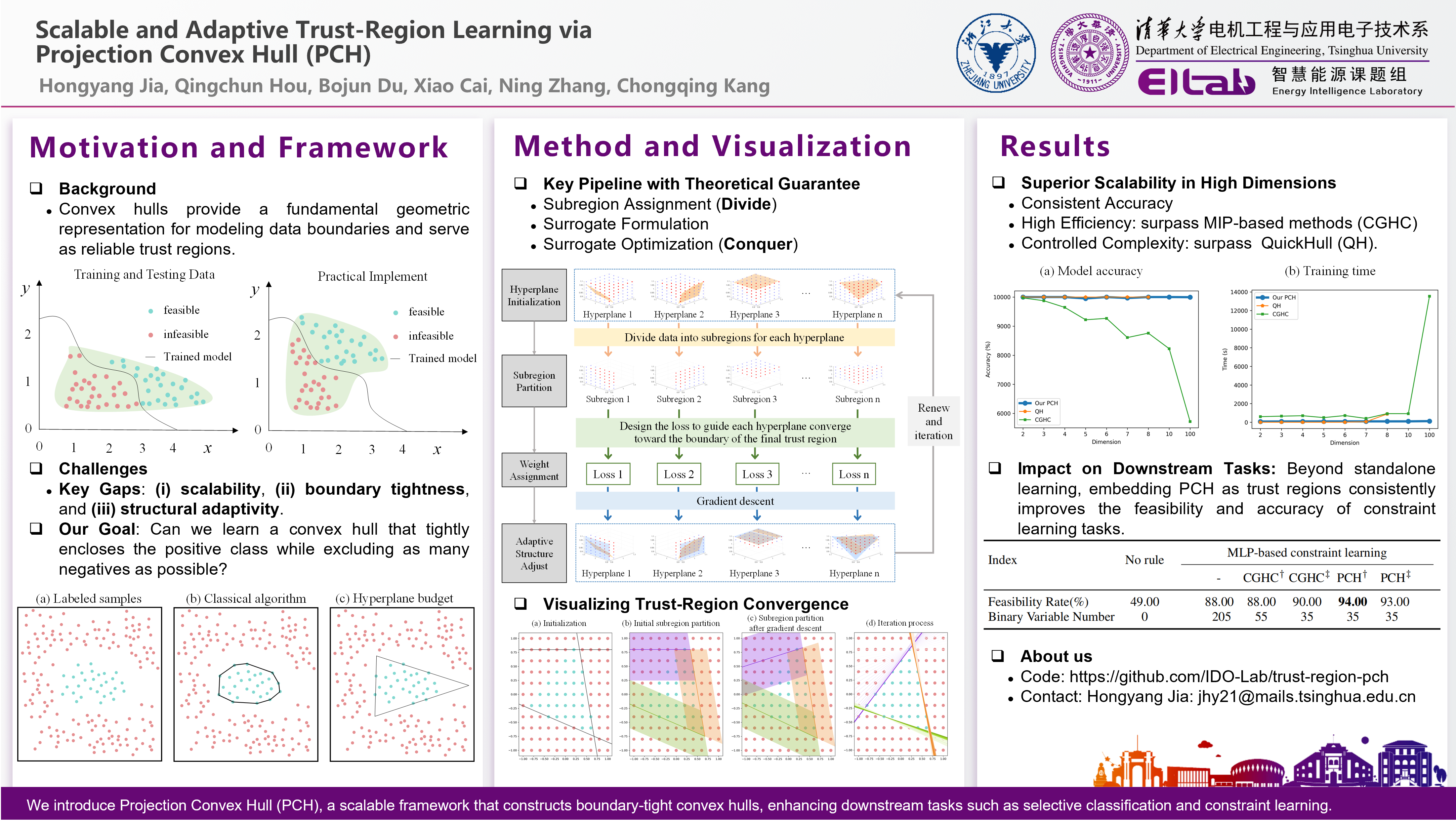
Learning compact and reliable convex hulls from data is a fundamental yet challenging problem with broad applications in classification, constraint learning, and decision optimization. We propose Projection Convex Hull (PCH), a scalable framework for learning polyhedral trust regions in high-dimensional spaces. Starting from an exact MINLP formulation, we derive an unconstrained surrogate objective and show that, under suitable weight assignments, the optimal hyperplanes of the MINLP are recovered as stationary points of the surrogate. Building on this theoretical foundation, PCH adaptively constructs and refines hyperplanes by subregion partition, strategic weight assignment, and gradient-based updates, yielding convex hulls that tightly enclose the positive class while excluding negatives. The learned polyhedra can serve as geometric trust regions to enhance selective classification and constraint learning. Extensive experiments on synthetic and real-world datasets demonstrate that PCH achieves strong performance in accuracy, scalability, and model compactness, outperforming classical geometric algorithms and recent optimization-based approaches, especially in high-dimensional and large-scale settings. These results confirm the value of PCH as a theoretically grounded and practically effective framework for trust-region learning. Codes are available at https://github.com/IDO-Lab/trust-region-pch.