Policy Likelihood-based Query Sampling and Critic-Exploited Reset for Efficient Preference-based Reinforcement Learning
{kind=link}
Abstract
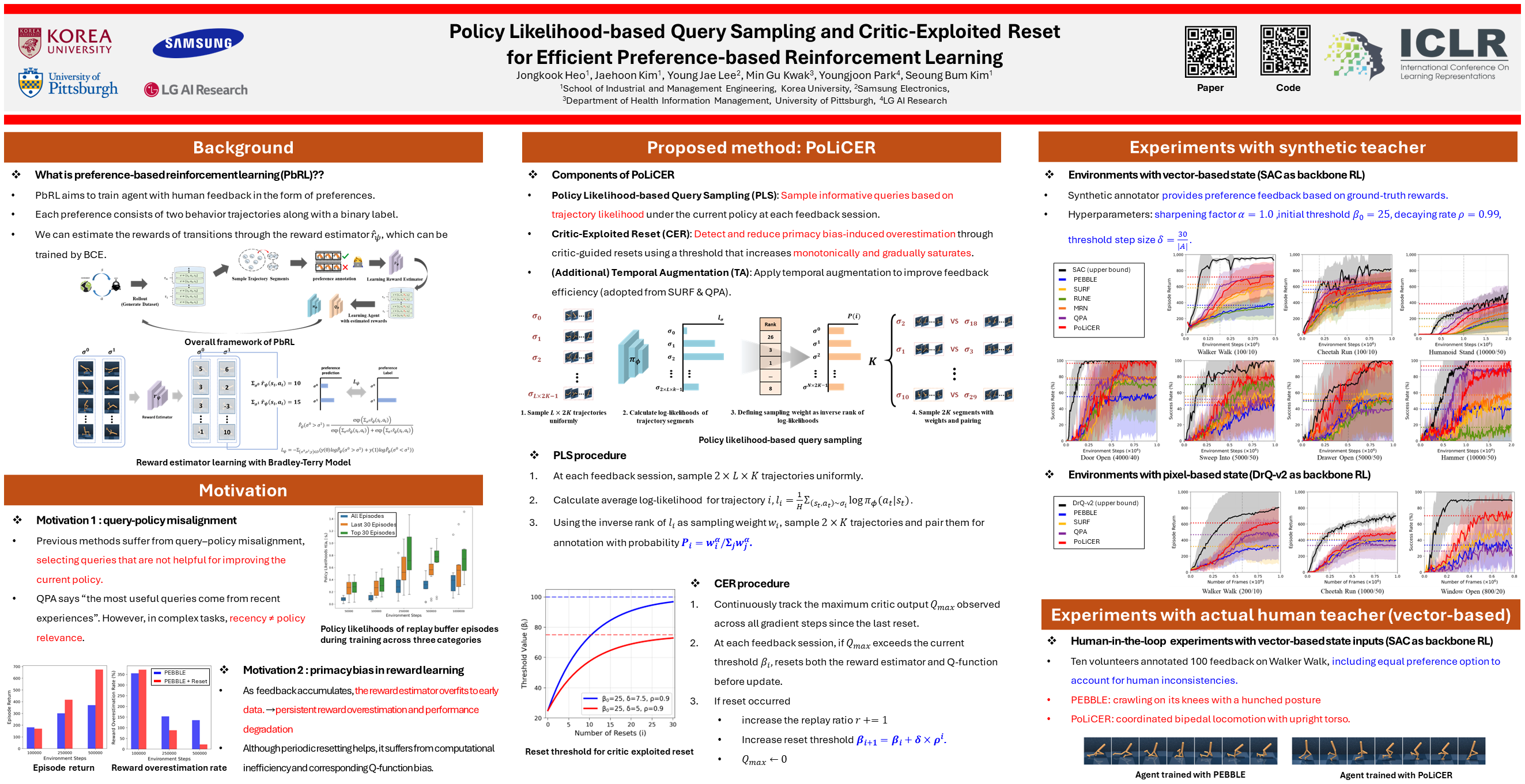
Preference-based reinforcement learning (PbRL) enables agent training without explicit reward design by leveraging human feedback. Although various query sampling strategies have been proposed to improve feedback efficiency, many fail to enhance performance because they select queries from outdated experiences with low likelihood under the current policy. Such queries may no longer represent the agent's evolving behavior patterns, reducing the informativeness of human feedback. To address this issue, we propose a policy likelihood-based query sampling and critic-exploited reset (PoLiCER). Our approach uses policy likelihood-based query sampling to ensure that queries remain aligned with the agent’s evolving behavior. However, relying solely on policy-aligned sampling can result in overly localized guidance, leading to overestimation bias, as the model tends to overfit to early feedback experiences. To mitigate this, PoLiCER incorporates a dynamic resetting mechanism that selectively resets the reward estimator and its associated Q-function based on critic outputs. Experimental evaluation across diverse locomotion and robotic manipulation tasks demonstrates that PoLiCER consistently outperforms existing PbRL methods. Our code is available at https://github.com/JongKook-Heo/PoLiCER.