RoboMD: Uncovering Robot Vulnerabilities through Semantic Potential Fields
{kind=link}
Abstract
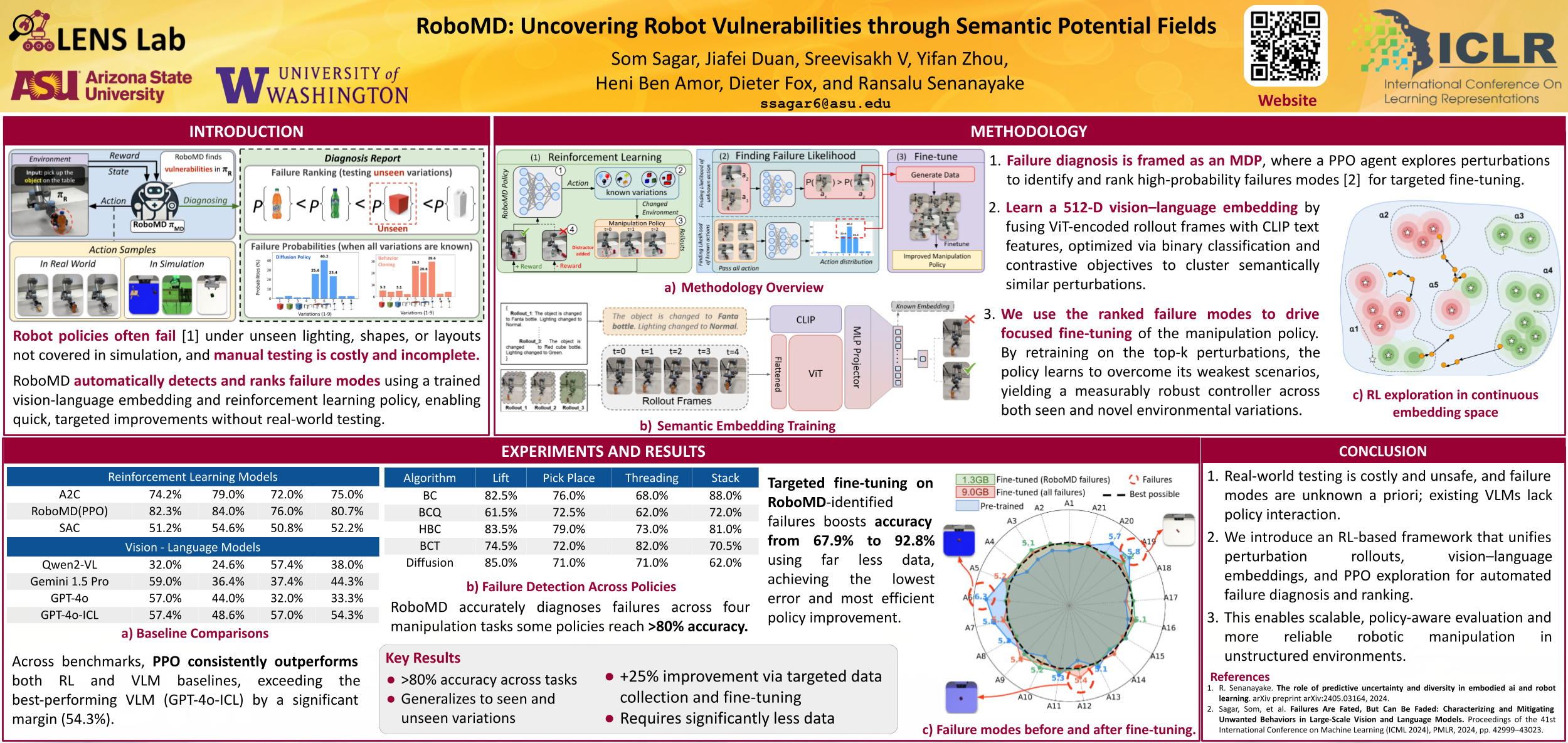
Robot manipulation policies, while central to the promise of physical AI, are highly vulnerable in the presence of external variations in the real world. Diagnosing these vulnerabilities is hindered by two key challenges: (i) the relevant variations to test against are often unknown, and (ii) direct testing in the real world is costly and unsafe. We introduce a framework that tackles both issues by learning a separate deep reinforcement learning (deep RL) policy for vulnerability prediction through virtual runs on a continuous vision-language embedding trained with limited success-failure data. By treating this embedding space, which is rich in semantic and visual variations, as a potential field, the policy learns to move toward vulnerable regions while being repelled from success regions. This vulnerability prediction policy, trained on virtual rollouts, enables scalable and safe vulnerability analysis without expensive physical trials. By querying this policy, our framework builds a probabilistic vulnerability-likelihood map. Experiments across simulation benchmarks and a physical robot arm show that our framework uncovers up to 23\% more unique vulnerabilities than state-of-the-art vision-language baselines, revealing subtle vulnerabilities overlooked by heuristic testing. Additionally, we show that fine-tuning the manipulation policy with the vulnerabilities discovered by our framework improves manipulation performance with much less fine-tuning data.