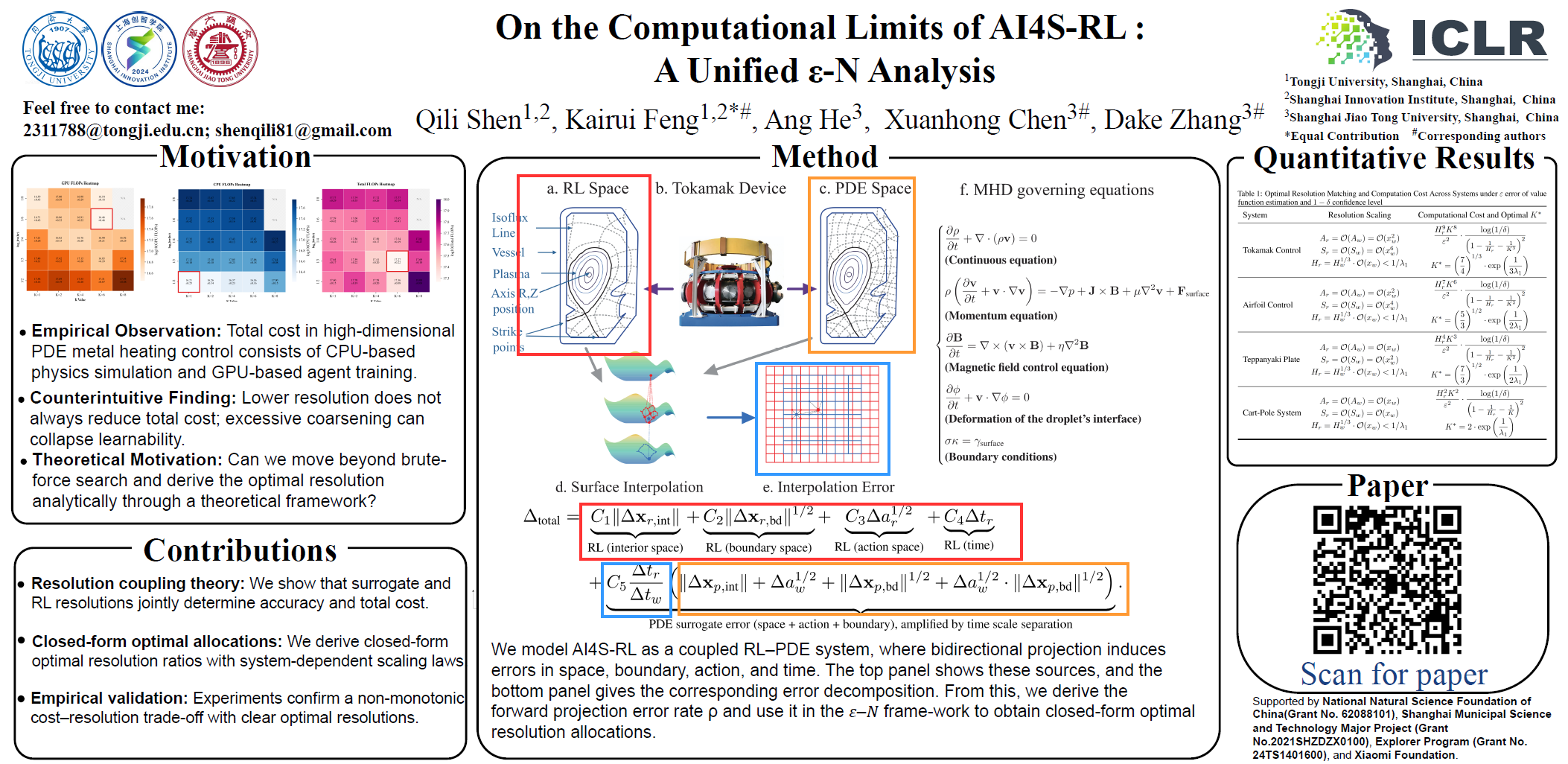
On the Computational Limits of AI4S-RL : A Unified $\varepsilon$-$N$ Analysis
Qili Shen ⋅ Kairui Feng ⋅ Ang He ⋅ Xuanhong Chen ⋅ Dake Zhang
{kind=link}
Abstract
Recent work increasingly adopts AI for Science (AI4S) models to replace expensive PDE solvers as simulation environments for reinforcement learning (RL), enabling faster training in complex physical control tasks. However, using approximate simulators introduces modeling errors that affect the learned policy. In this paper, we introduce a unified $\varepsilon$-$N$ framework that quantifies the minimal computational cost $N^*(\varepsilon)$ required for an AI4S model to ensure that tabular RL can estimate the value function with unbiasedness, with probability at least $1 - \delta$. This characterization allows us to connect surrogate accuracy, grid resolution, and RL policy quality under a shared probabilistic language. We analyze how the discretization level $K$ of AI4S and RL space governs both PDE surrogate error and RL lattice approximation error, and we employ spectral theory and Sobolev estimates to derive optimal grid strategies that minimize total cost while preserving learning fidelity. Our theory reveals that different systems, such as ODE- and PDE-governed environments, require different allocations of effort between physical simulation and RL optimization. Overall, our framework offers a principled foundation for designing efficient, scalable, and cost-aware AI4S-RL systems with provable learning guarantees.
Video
Chat is not available.
Successful Page Load