DRIFT: Divergent Response in Filtered Transformations for Robust Adversarial Defense
{kind=link}
Abstract
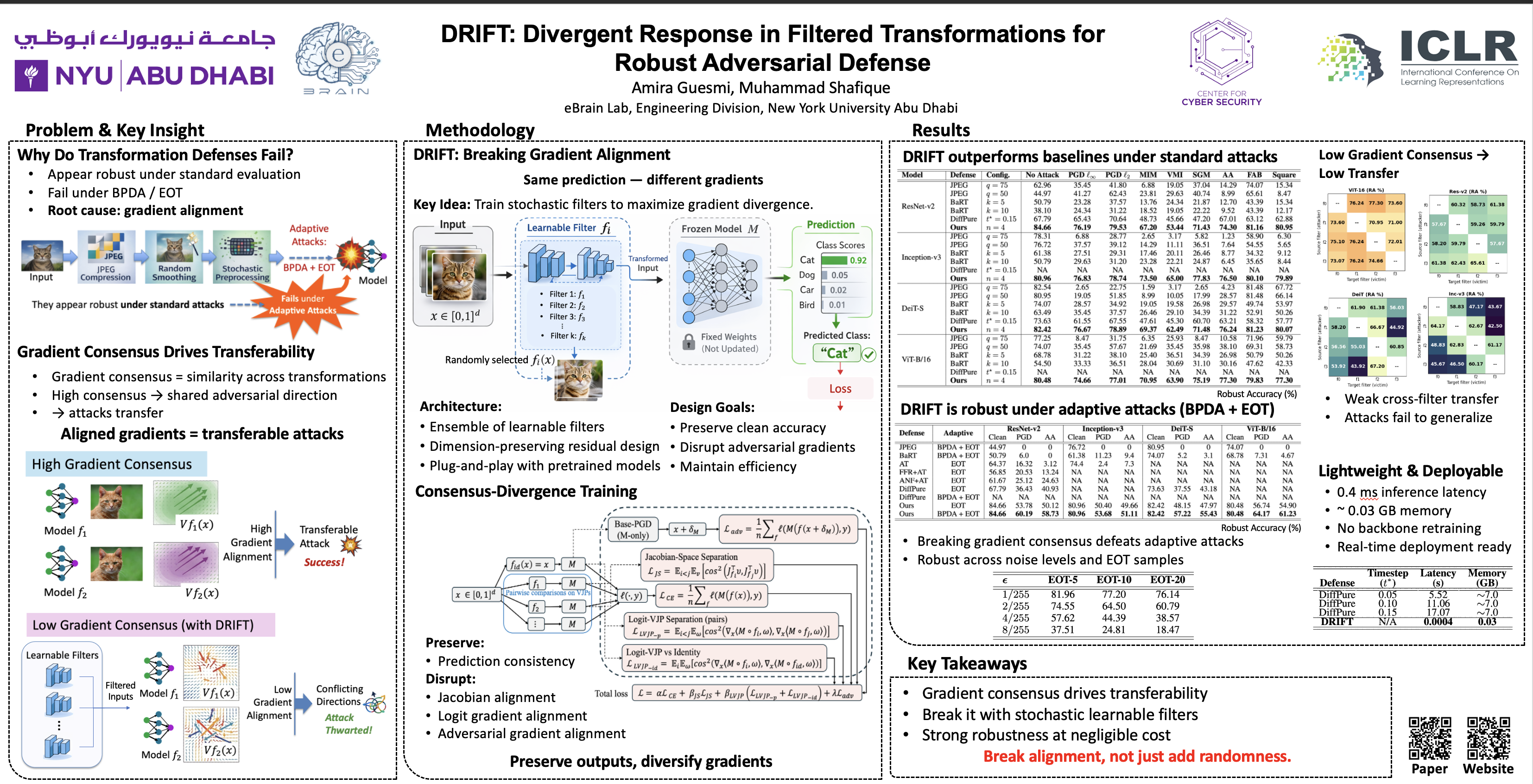
Deep neural networks remain highly vulnerable to adversarial examples, and most defenses collapse once gradients can be reliably estimated. We identify \emph{gradient consensus}—the tendency of randomized transformations to yield aligned gradients—as a key driver of adversarial transferability. Attackers exploit this consensus to construct perturbations that remain effective across transformations. We introduce \textbf{DRIFT} (Divergent Response in Filtered Transformations), a stochastic ensemble of lightweight, learnable filters trained to actively disrupt gradient consensus. Unlike prior randomized defenses that rely on gradient masking, DRIFT enforces \emph{gradient dissonance} by maximizing divergence in Jacobian- and logit-space responses while preserving natural predictions. Our contributions are threefold: (i) we formalize gradient consensus and provide a theoretical analysis linking consensus to transferability; (ii) we propose a consensus-divergence training strategy combining prediction consistency, Jacobian separation, logit-space separation, and adversarial robustness; and (iii) we show that DRIFT achieves substantial robustness gains on ImageNet across CNNs and Vision Transformers, outperforming state-of-the-art preprocessing, adversarial training, and diffusion-based defenses under adaptive white-box, transfer-based, and gradient-free attacks. DRIFT delivers these improvements with negligible runtime and memory cost, establishing gradient divergence as a practical and generalizable principle for adversarial defense.