Behavior Proximal Policy Optimization
{kind=link}
Abstract
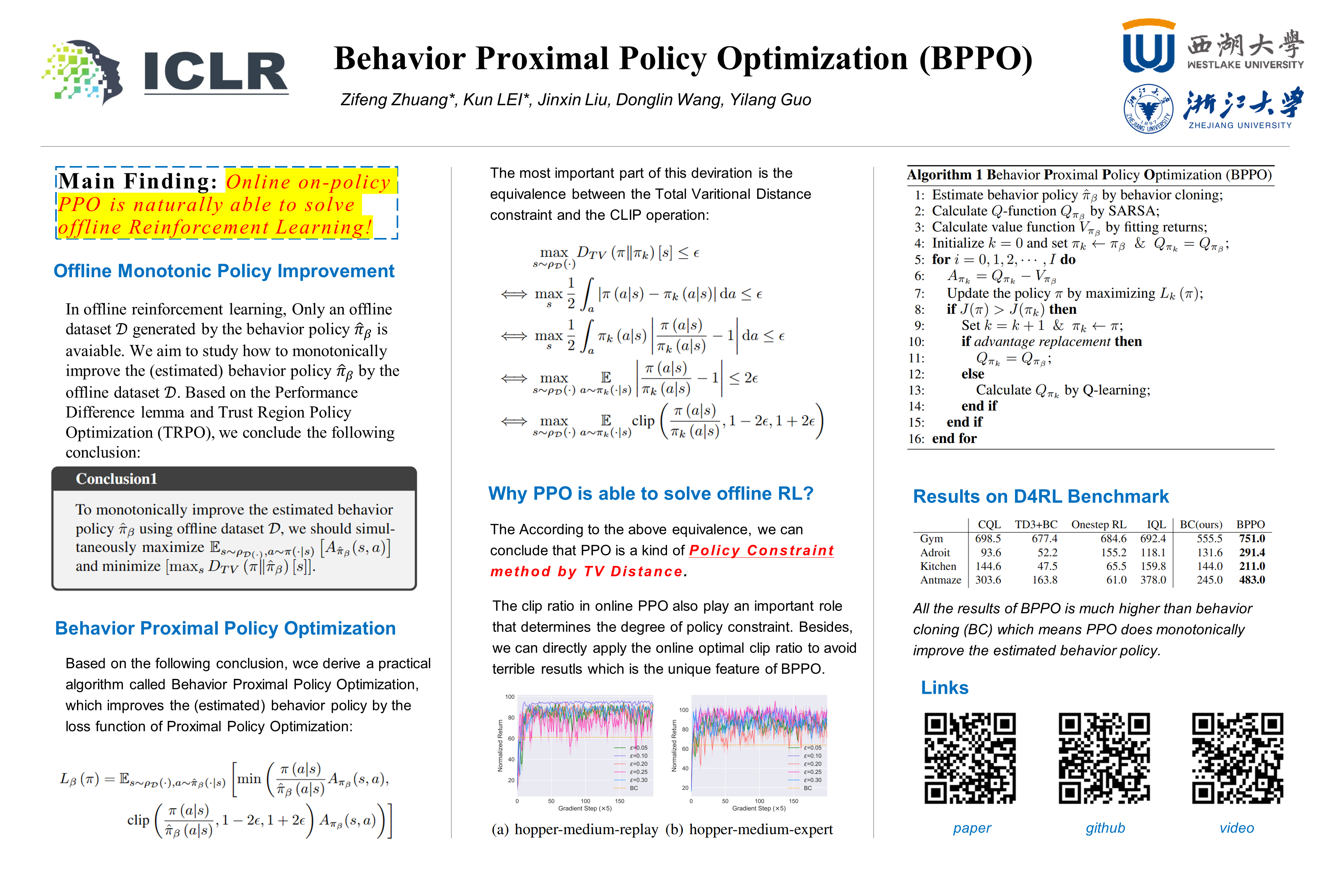
Offline reinforcement learning (RL) is a challenging setting where existing off-policy actor-critic methods perform poorly due to overestimating of out-of-distribution state-action pairs. Thus, various additional augmentations are proposed to keep the learned policy close to the offline dataset (or the behavior policy). In this work, starting from the analysis of offline monotonic policy improvement, we reach a surprising conclusion that online on-policy algorithms are naturally able to solve offline RL. Specifically, the inherent conservatism of these on-policy algorithms is exactly what the offline RL method needs to overcome the overestimation. Based on this, we propose Behavior Proximal Policy Optimization (BPPO), which solves offline RL without any extra constraint or regularization introduced compared to PPO. Extensive experiments on the D4RL benchmark empirically show this extremely succinct method outperforms state-of-the-art offline RL algorithms. Our implementation is available at https://github.com/Dragon-Zhuang/BPPO.