Discovering Generalizable Multi-agent Coordination Skills from Multi-task Offline Data
{kind=link}
Abstract
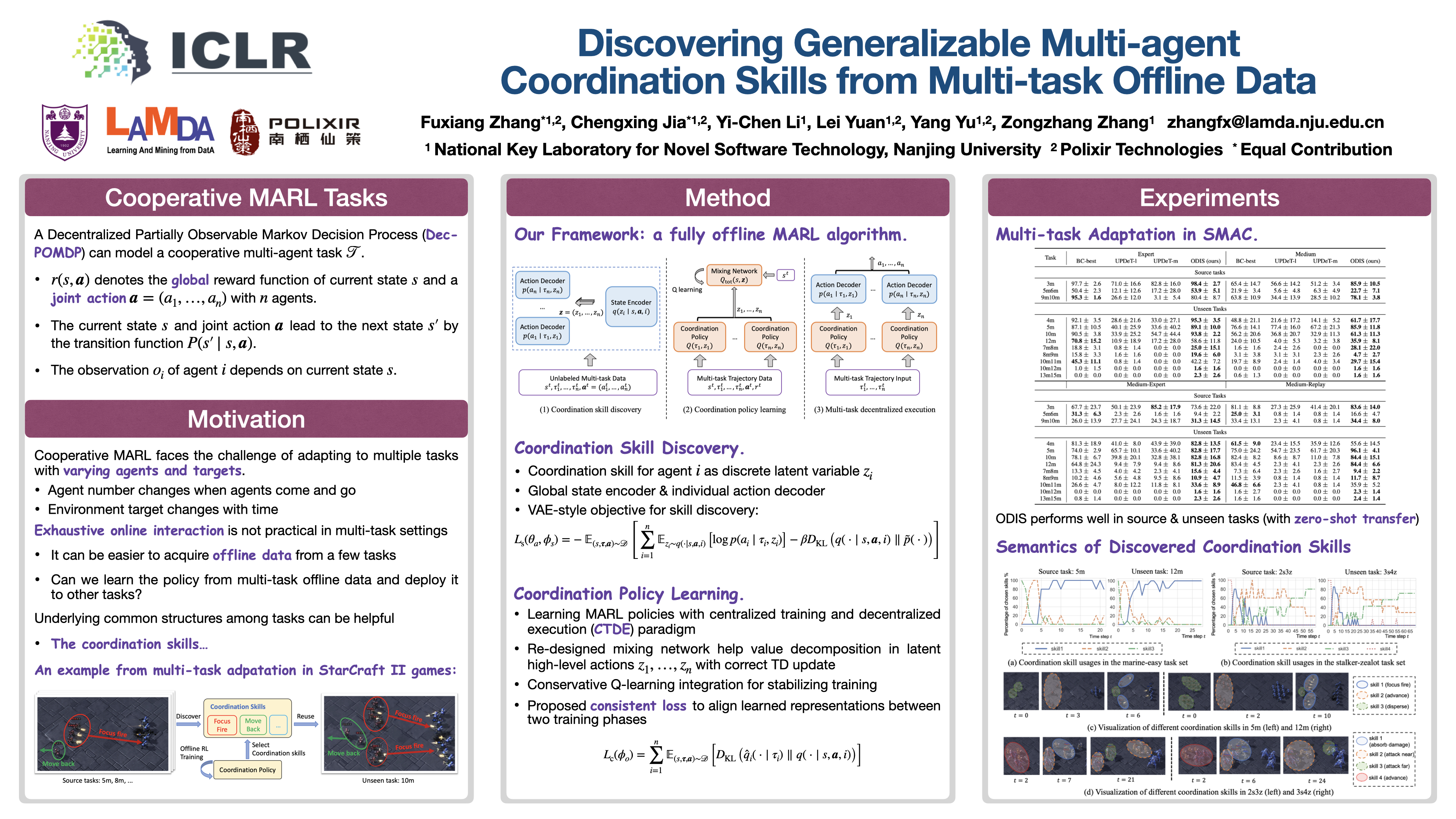
Cooperative multi-agent reinforcement learning (MARL) faces the challenge of adapting to multiple tasks with varying agents and targets. Previous multi-task MARL approaches require costly interactions to simultaneously learn or fine-tune policies in different tasks. However, the situation that an agent should generalize to multiple tasks with only offline data from limited tasks is more in line with the needs of real-world applications. Since offline multi-task data contains a variety of behaviors, an effective data-driven approach is to extract informative latent variables that can represent universal skills for realizing coordination across tasks. In this paper, we propose a novel Offline MARL algorithm to Discover coordInation Skills (ODIS) from multi-task data. ODIS first extracts task-invariant coordination skills from offline multi-task data and learns to delineate different agent behaviors with the discovered coordination skills. Then we train a coordination policy to choose optimal coordination skills with the centralized training and decentralized execution paradigm. We further demonstrate that the discovered coordination skills can assign effective coordinative behaviors, thus significantly enhancing generalization to unseen tasks. Empirical results in cooperative MARL benchmarks, including the StarCraft multi-agent challenge, show that ODIS obtains superior performance in a wide range of tasks only with offline data from limited sources.