PD-MORL: Preference-Driven Multi-Objective Reinforcement Learning Algorithm
{kind=link}
Abstract
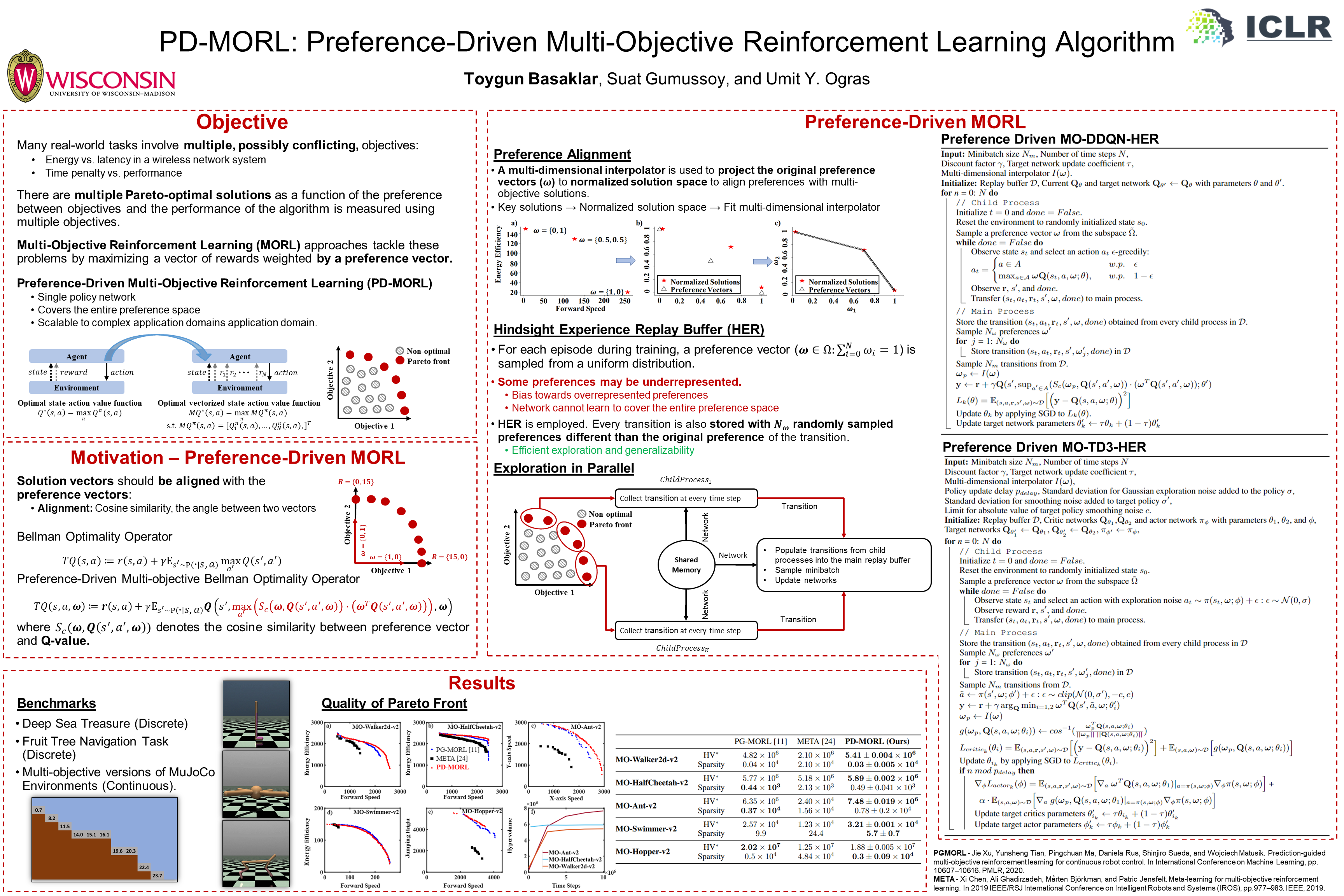
Multi-objective reinforcement learning (MORL) approaches have emerged to tackle many real-world problems with multiple conflicting objectives by maximizing a joint objective function weighted by a preference vector. These approaches find fixed customized policies corresponding to preference vectors specified during training. However, the design constraints and objectives typically change dynamically in real-life scenarios. Furthermore, storing a policy for each potential preference is not scalable. Hence, obtaining a set of Pareto front solutions for the entire preference space in a given domain with a single training is critical. To this end, we propose a novel MORL algorithm that trains a single universal network to cover the entire preference space scalable to continuous robotic tasks. The proposed approach, Preference-Driven MORL (PD-MORL), utilizes the preferences as guidance to update the network parameters. It also employs a novel parallelization approach to increase sample efficiency. We show that PD-MORL achieves up to 25% larger hypervolume for challenging continuous control tasks and uses an order of magnitude fewer trainable parameters compared to prior approaches.